
ဗီဒီယို
အထွေထွေဖော်ပြချက်
TP-TGXG-200 Automatic Bottle Capping Machine ကို ပုလင်းများပေါ်တွင် အလိုအလျောက် ဝက်အူထုပ်ပြုလုပ်ရန်အတွက် အသုံးပြုပါသည်။ အစားအသောက်၊ ဆေးဝါး၊ ဓာတုဗေဒ လုပ်ငန်းစသည်ဖြင့် တွင်ကျယ်စွာ အသုံးချသည်။ ပုံသဏ္ဍာန်၊ ပစ္စည်း၊ အရွယ်အစား၊ ပုံမှန်ပုလင်းများနှင့် ဝက်အူထုပ်များပေါ်တွင် ကန့်သတ်ချက်မရှိပါ။ ဆက်တိုက်ထုပ်ပိုးမှုအမျိုးအစားသည် TP-TGXG-200 ကို အမျိုးမျိုးသော ထုပ်ပိုးမှုလိုင်းအမြန်နှုန်းသို့ လိုက်လျောညီထွေဖြစ်စေသည်။ ဤစက်သည် အမှန်တကယ်တွင် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုနိုင်ပြီး လည်ပတ်ရလွယ်ကူသော ရည်ရွယ်ချက်များစွာရှိပါသည်။ သမားရိုးကျ ပြတ်တောင်းပြတ်တောင်း အလုပ်အမျိုးအစားနှင့် နှိုင်းယှဉ်ပါက၊ TP-TGXG-200 သည် ပိုမိုထိရောက်မှု မြင့်မားသည်၊ ပိုမိုတင်းကျပ်သော ဖိနှိပ်မှုဖြစ်ပြီး ဦးထုပ်များကို ထိခိုက်မှု နည်းပါးစေသည်။
လျှောက်လွှာ
အလိုအလျောက် ထုပ်ပိုးသည့်စက်ကို အရွယ်အစားအမျိုးမျိုး၊ ပုံသဏ္ဍာန်မျိုးစုံနှင့် ပစ္စည်းများအဖြစ် ဝက်အူထုပ်များပါရှိသော ပုလင်းများတွင် အသုံးပြုနိုင်သည်။
A. ပုလင်းအရွယ်အစား
20-120mm အချင်းနှင့် 60-180mm အမြင့်ရှိသော ပုလင်းများအတွက် သင့်လျော်သည်။ ဒါပေမယ့် သင့်တော်တဲ့ ပုလင်းအရွယ်အစားကို ဒီအတိုင်းအတာထက်ကျော်လွန်ပြီး စိတ်ကြိုက်ပြင်ဆင်နိုင်ပါတယ်။

ခ။ ပုလင်းပုံသဏ္ဍာန်
အလိုအလျောက် ထုပ်ပိုးထားသော စက်ကို အဝိုင်းစတုရန်းပုံ သို့မဟုတ် ရှုပ်ထွေးသော ပုံသဏ္ဍာန် အမျိုးမျိုးတွင် အသုံးချနိုင်သည်။




ဂ။ ပုလင်းနှင့် ဦးထုပ် ပစ္စည်းများ
ဖန်ပလပ်စတစ် သို့မဟုတ် သတ္တု မည်သို့ပင်ဖြစ်စေ အလိုအလျောက် အဖုံးအုပ်စက်သည် ၎င်းတို့အားလုံးကို ကိုင်တွယ်နိုင်သည်။


D. Screw cap အမျိုးအစား
အလိုအလျောက် ထုပ်ပိုးထားသောစက်သည် ဝက်အူထုပ်၊ ပန့်၊ ဖြန်း၊ အဖုံးစသည်ဖြင့် ဝက်အူအမျိုးမျိုးကို ဝက်အူလှည့်နိုင်သည်။



အီး
အလိုအလျောက် ထုပ်ပိုးထားသောစက်သည် အမှုန့်၊ အရည်၊ granule ထုပ်ပိုးသည့်လိုင်း၊ သို့မဟုတ် အစားအသောက်၊ ဆေးဝါး၊ ဓာတုဗေဒ သို့မဟုတ် အခြားစက်မှုလုပ်ငန်း မည်သည်ဖြစ်စေ လုပ်ငန်းအမျိုးမျိုးတွင် ပါဝင်နိုင်သည်။ ဝက်အူအဖုံးများရှိသည့်နေရာတိုင်းတွင် အလိုအလျောက် ထုပ်ပိုးထားသောစက် ရှိပါသည်။
ဆောက်လုပ်ရေးနှင့်လုပ်ငန်းဆောင်ရွက်ချက်
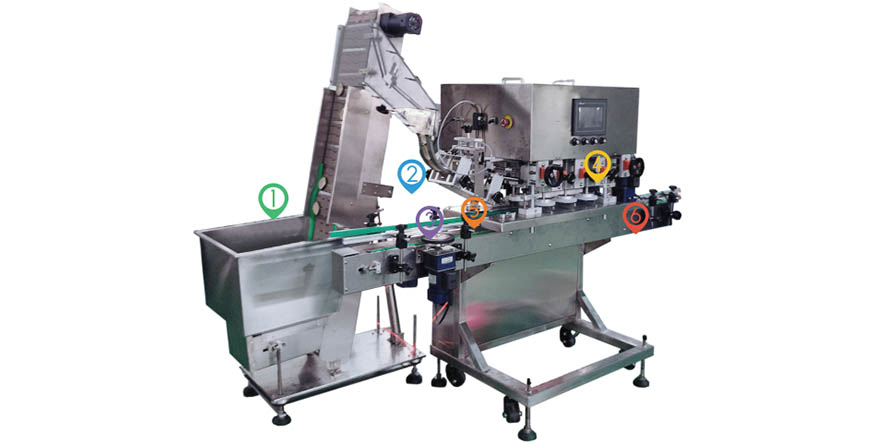
၎င်းတွင် ထုပ်ပိုးသည့်စက်နှင့် ထုပ်ပိုးမှုတ်စက်တို့ ပါဝင်သည်။
1. Cap feeder
2. ဦးထုပ်နေရာယူခြင်း။
3. ပုလင်းခွဲစက်
4. Capping wheels
5. ပုလင်းညှပ် ခါးပတ်
6. ပုလင်းသယ်ဆောင်ခြင်းခါးပတ်
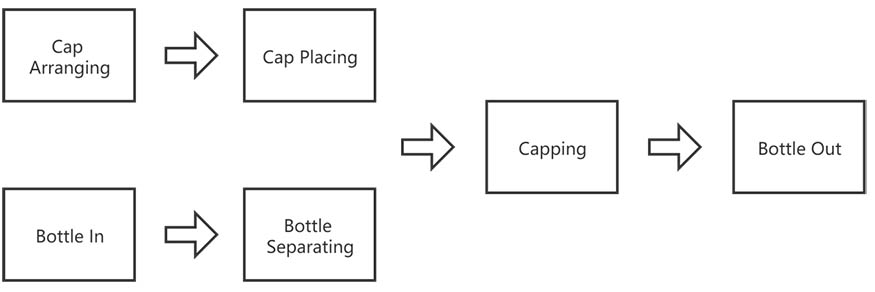
အောက်ပါတို့သည် လုပ်ဆောင်ရမည့် လုပ်ငန်းစဉ်များဖြစ်သည်။
အင်္ဂါရပ်များ
■ ပုံသဏ္ဍာန်မျိုးစုံနှင့် ပစ္စည်းများ၏ ပုလင်းများနှင့် ဦးထုပ်များတွင် တွင်ကျယ်စွာ အသုံးပြုသည်။
■ PLC & ထိတွေ့မျက်နှာပြင်ထိန်းချုပ်မှု၊ လည်ပတ်ရလွယ်ကူသည်။
■ လွယ်ကူသောလည်ပတ်မှုနှင့် ချိန်ညှိမှုလွယ်ကူသော၊ လူ့အရင်းအမြစ်အပြင် အချိန်ကုန်လည်း များစွာသက်သာစေပါသည်။
■ ထုပ်ပိုးလိုင်းအမျိုးမျိုးအတွက် သင့်လျော်သော မြင့်မားပြီး ချိန်ညှိနိုင်သော အမြန်နှုန်း။
■ တည်ငြိမ်သောစွမ်းဆောင်ရည်နှင့် မြင့်မားတိကျသည်။
■ ခလုတ်တစ်ခုက စတင်သည့်လုပ်ဆောင်ချက်သည် များစွာအဆင်ပြေစေပါသည်။
■ အသေးစိတ်ဒီဇိုင်းက စက်ကို လူသားဆန်ပြီး ဉာဏ်ရည်ထက်မြက်စေတယ်။
■ စက်၏အမြင်၊ မြင့်မားသောအဆင့်ဒီဇိုင်းနှင့် အသွင်အပြင်အပေါ် အချိုးအစားကောင်းမွန်သည်။
■ စက်ကိုယ်ထည်ကို SUS 304 ဖြင့်ပြုလုပ်ထားပြီး GMP စံနှုန်းနှင့်ကိုက်ညီသည်။
■ ပုလင်းနှင့် အဖုံးပါသော အဆက်အသွယ် အစိတ်အပိုင်းအားလုံးကို အစားအစာအတွက် ဘေးကင်းလုံခြုံသော ပစ္စည်းဖြင့် ပြုလုပ်ထားသည်။
■ ပုလင်းပြောင်းခြင်းအတွက် အဆင်ပြေစေမည့် မတူညီသောပုလင်းအရွယ်အစားကိုပြသရန် ဒစ်ဂျစ်တယ်ဖန်သားပြင်မျက်နှာပြင်။
■ အမှားအယွင်းပါသော ပုလင်းများကို ဖယ်ရှားရန် Optronic အာရုံခံကိရိယာ (Option)။
■ အဖုံးများတွင် အလိုအလျောက် အစာကျွေးရန် လှမ်းဆွဲထားသော စက်။
■ အဖုံးပြုတ်ကျသည့်အပိုင်းသည် အမှားအယွင်းအဖုံးများကို ဖယ်ရှားနိုင်သည် (လေမှုတ်ထုတ်ခြင်းနှင့် အလေးချိန်တိုင်းတာခြင်း)။
■ အဖုံးများကို ဖိရန် ခါးပတ်သည် စောင်းနေသဖြင့် အဖုံးကို မှန်ကန်သောနေရာတွင် ချိန်ညှိပြီးနောက် နှိပ်နိုင်သည်။
အသိဉာဏ်
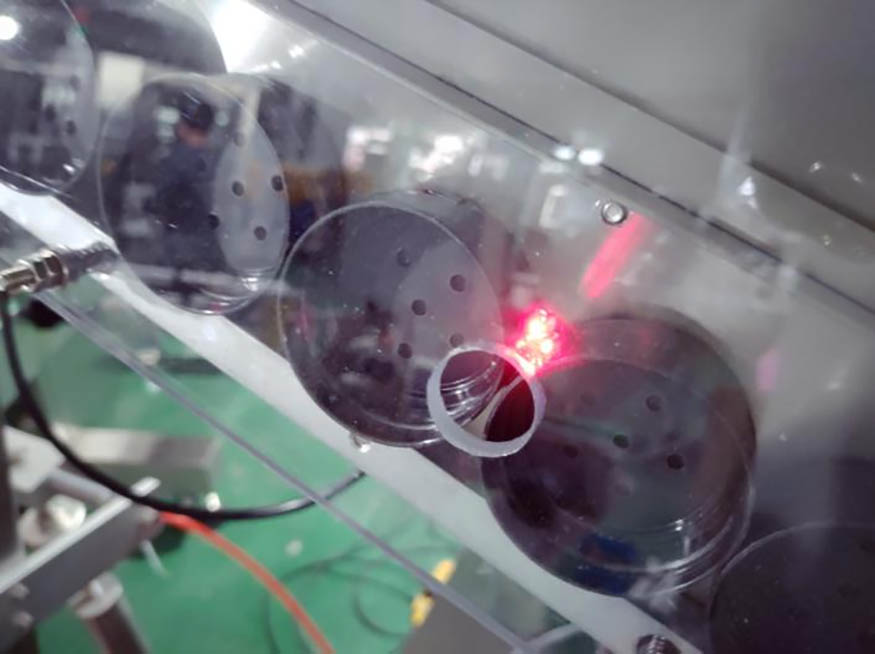
ဦးထုပ်၏ဘေးနှစ်ဖက်ရှိ မတူညီသောဗဟိုချိန်ခွင်လျှာကိုအသုံးပြုပါ၊ မှန်ကန်သောဦးတည်ချက်ထုပ်ကိုသာ အပေါ်မှရွှေ့နိုင်သည်။ ဦးထုပ်သည် လမ်းကြောင်းမှားနေပါက အလိုအလျောက် ပြုတ်ကျသွားမည်ဖြစ်သည်။
Conveyor သည် ဦးထုပ်များကို အပေါ်မှယူဆောင်ပြီးနောက်၊ လေမှုတ်ကိရိယာသည် ဦးထုပ်များကို ဦးထုပ်လမ်းကြောင်းသို့ မှုတ်ပေးသည်။

Error lids sensor သည် ပြောင်းပြန်အဖုံးများကို အလွယ်တကူ သိရှိနိုင်သည်။ အလိုအလျောက် အမှားအယွင်း ထုပ်များဖယ်ရှားပေးသည့် ကိရိယာနှင့် ပုလင်းအာရုံခံကိရိယာသည် ကောင်းမွန်သော ထုပ်ပိုးမှုအကျိုးသက်ရောက်မှုကို ရောက်ရှိစေပါသည်။
Bottle Separator သည် ပုလင်းများ၏ ရွေ့လျားနှုန်းကို ၎င်း၏ အနေအထားတွင် ချိန်ညှိခြင်းဖြင့် ပုလင်းများကို တစ်ခုနှင့်တစ်ခု ခွဲခြားပေးသည်။ အဝိုင်းပုလင်းများသည် ပုံမှန်အားဖြင့် ခြားနားချက်တစ်ခု လိုအပ်ပြီး စတုရန်းပုလင်းများသည် ဆန့်ကျင်ဘက် ခြားနားမှုနှစ်ခု လိုအပ်ပါသည်။


Cap မရှိခြင်း ကိရိယာသည် ထုပ်ပိုးမှု လည်ပတ်နေပြီး အလိုအလျောက် ရပ်တန့်ခြင်းကို ထိန်းချုပ်သည်။ ဦးထုပ်လမ်းကြောင်း၏ ဘေးနှစ်ဖက်တွင် အာရုံခံကိရိယာနှစ်ခုပါရှိပြီး တစ်ခုမှာ ခြေရာခံအထုပ်များ ပြည့်နေခြင်း၊ နောက်တစ်ခုသည် လမ်းကြောင်းလွတ်ရှိမရှိ စစ်ဆေးရန် အာရုံခံကိရိယာနှစ်ခုရှိသည်။
ထိရောက်တယ်။
ပုလင်း conveyor နှင့် cap feeder ၏အမြင့်ဆုံးအမြန်နှုန်းသည် 100 bpm သို့ရောက်ရှိနိုင်ပြီး၊ ထုပ်ပိုးမှုလိုင်းအမျိုးမျိုးနှင့်ကိုက်ညီစေရန်စက်ကိုမြန်နှုန်းမြင့်ယူဆောင်လာသည်။
ဘီးသုံးဘီး အတွဲအဝိုင်းကို အမြန်ပိတ်ပါ။ အတွဲတစ်ခုစီတွင် သီးခြားလုပ်ဆောင်ချက် ရှိပါသည်။ ပထမတွဲသည် ခက်ခဲသော ထုပ်ပိုးများကို ၎င်း၏မှန်ကန်သောအနေအထားတွင်ဖြစ်စေရန် နောက်ပြန်လှည့်နိုင်သည်။ ဒါပေမယ့် ဦးထုပ်က ပုံမှန်ဆိုရင် ဒုတိယအတွဲဘီးတွေနဲ့ သင့်တော်တဲ့ အနေအထားရောက်အောင် အလှည့်ကျ အလှည့်ကျ ပြုလုပ်နိုင်ပါတယ်။ တတိယအတွဲများသည် ဦးထုပ်တင်းကျပ်စေရန် အနည်းငယ်ချိန်ညှိထားသောကြောင့် ၎င်းတို့၏အမြန်နှုန်းသည် ဘီးအားလုံးတွင် အနှေးဆုံးဖြစ်သည်။

အဆင်ပြေတယ်။
အခြားပေးသွင်းသူများထံမှ လက်ဘီးချိန်ညှိခြင်းနှင့် နှိုင်းယှဥ်ရန်၊ ခလုတ်တစ်ခုအား မြှင့်တင်ရန် သို့မဟုတ် အောက်ချရန် ခလုတ်တစ်ခုသည် ကိရိယာတစ်ခုလုံးအတွက် ပို၍အဆင်ပြေပါသည်။
ဘယ်မှညာသို့ ခလုတ်လေးခုကို ပုလင်းသယ်ယူသူ၏ အမြန်နှုန်း၊ ပုလင်းကုပ်၊ ဦးထုပ်တက်ခြင်းနှင့် ပုလင်းကွဲခြင်းတို့ကို ချိန်ညှိရန် အသုံးပြုသည်။ ဒိုင်ခွက်သည် အော်ပရေတာအား ပက်ကေ့ခ်ျအမျိုးအစားတစ်ခုစီအတွက် သင့်လျော်သောအမြန်နှုန်းသို့ လွယ်ကူစွာရောက်ရှိစေရန် လမ်းညွှန်ပေးနိုင်သည်။


ပုလင်းကုပ်ခါးပတ်နှစ်ခုကြား အကွာအဝေးကို အလွယ်တကူပြောင်းရန် လက်ဘီးများ။ ကုပ်ခါးပတ်၏အစွန်းနှစ်ခုတွင်ဘီးနှစ်ခုရှိသည်။ ပုလင်းအရွယ်အစားကို ပြောင်းလဲသည့်အခါ ဒိုင်ခွက်သည် အော်ပရေတာအား မှန်ကန်သောအနေအထားသို့ တိကျစွာရောက်ရှိစေရန် ဦးဆောင်ပေးသည်။
ဘီးများနှင့် ဦးထုပ်များကြား အကွာအဝေးကို ချိန်ညှိရန် ခလုတ်များ။ အကွာအဝေးက ပိုနီးလေလေ ဦးထုပ်က ပိုတင်းကျပ်လာမယ်။ Dial သည် အော်ပရေတာအား အသင့်တော်ဆုံး အကွာအဝေးကို ရှာဖွေရန် ကူညီပေးသည်။

လွယ်ကူသောလည်ပတ်မှု
ရိုးရှင်းသော လည်ပတ်မှုပရိုဂရမ်ဖြင့် PLC&touch မျက်နှာပြင်ထိန်းချုပ်မှုသည် အလုပ်ပိုမိုလွယ်ကူစေပြီး ပိုမိုထိရောက်စေသည်။


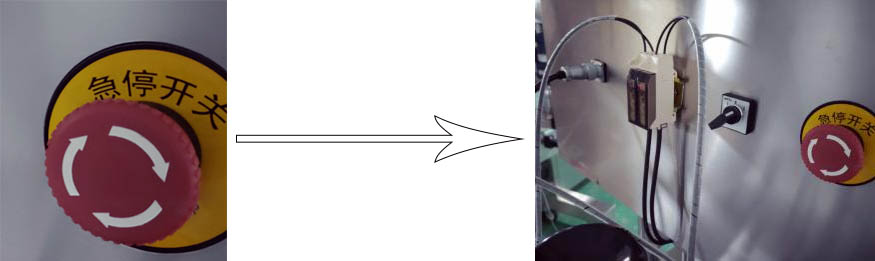
အော်ပရေတာကို ဘေးကင်းအောင်နေစေသည့် အရေးပေါ်အခိုက်အတန့်တွင် စက်ကို ချက်ချင်းရပ်တန့်ရန် အရေးပေါ်ခလုတ်။
| TP-TGXG-200 ပုလင်းဖုံးစက် | |||
| စွမ်းရည် | 50-120 ပုလင်း / မိနစ် | အတိုင်းအတာ | 2100*900*1800mm |
| ပုလင်းချင်း | Φ22-120mm (လိုအပ်ချက်အရ စိတ်ကြိုက်ပြင်ဆင်သည်) | ပုလင်းအမြင့် | 60-280mm (လိုအပ်ချက်အရစိတ်ကြိုက်ပြင်ဆင်သည်) |
| အဖုံးအရွယ်အစား | Φ15-120mm | အသားတင်အလေးချိန် | 350 ကီလိုဂရမ် |
| အရည်အချင်းပြည့်နှုံး | ≥99% | ပါဝါ | 1300W |
| မေထရီ | သံမဏိ ၃၀၄ | ဓာတ်အား | 220V/50-60Hz (သို့မဟုတ် စိတ်ကြိုက်) |
| မရှိ | နာမည် | ဇာစ်မြစ် | အမှတ်တံဆိပ် |
| 1 | အင်ဗာတာ | ထိုင်ဝမ် | မြစ်ဝကျွန်းပေါ် |
| 2 | ဖန်ပြင်ကိုတို့ပြီးအသုံးပြုရခြင်း | တရုတ် | TouchWin |
| 3 | Optronic အာရုံခံကိရိယာ | ကိုရီးယား | အော်တိုနစ်များ |
| 4 | CPU ပါ။ | US | ATMEL |
| 5 | Interface Chip | US | MEX |
| 6 | ခါးပတ်ကိုနှိပ်ပါ။ | ရှန်ဟိုင်း |
|
| 7 | စီးရီးမော်တော် | ထိုင်ဝမ် | TALIKE/GPG |
| 8 | SS 304 ဘောင် | ရှန်ဟိုင်း | BaoSteel |
အလိုအလျောက် ထုပ်ပိုးသည့်စက်သည် ထုပ်ပိုးမှုလိုင်းတစ်ခုဖွဲ့စည်းရန် အဖြည့်စက်နှင့် တံဆိပ်ကပ်စက်ဖြင့် အလုပ်လုပ်နိုင်သည်။
A. ပုလင်းကို ဖယ်ထုတ်ခြင်း + အဖြည့်ခံစက် + အလိုအလျောက် အဖုံးအုပ်စက် + သတ္တုပြား အလုံပိတ်စက်။
B. ပုလင်း unscrambler + auger filler + အလိုအလျောက် capping machine + foil sealing machine + labeling machine


Box ထဲတွင် ဆက်စပ်ပစ္စည်းများ
■ ညွှန်ကြားချက်လက်စွဲ
■ လျှပ်စစ်ပုံကြမ်းနှင့် ချိတ်ဆက်မှုပုံကြမ်း
■ ဘေးကင်းရေး လုပ်ငန်းလမ်းညွှန်
■ ဝတ်ဆင်ထားသော အစိတ်အပိုင်းများ
■ ထိန်းသိမ်းမှုကိရိယာများ
■ ဖွဲ့စည်းမှုစာရင်း (မူလ၊ မော်ဒယ်၊ သတ်မှတ်ချက်များ၊ စျေးနှုန်း)



1. ဦးထုပ်ဓာတ်လှေကားနှင့် ဦးထုပ်နေရာယူခြင်းစနစ် တပ်ဆင်ခြင်း။
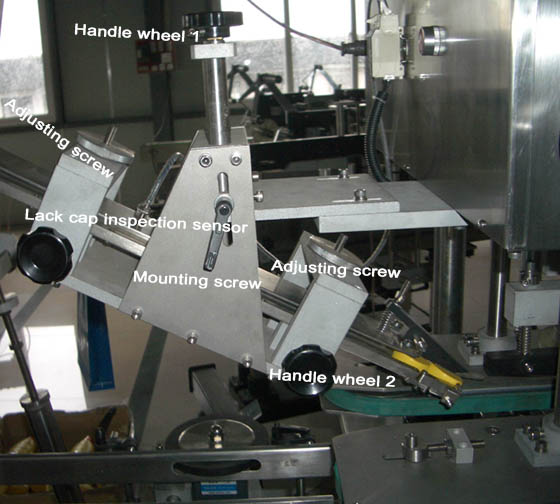
(၁) ဦးထုပ်စီစဉ်ခြင်းနှင့် ထောက်လှမ်းခြင်း အာရုံခံကိရိယာ တပ်ဆင်ခြင်း။
သင်္ဘောမတင်မီ ဓာတ်လှေကားနှင့် နေရာချသည့်စနစ်အား ပိုင်းခြားထားသည်။ စက်မလည်ပတ်မီ ထုပ်ပိုးထားသောစက်ပေါ်တွင် ဦးထုပ်စီစဉ်ခြင်းနှင့် နေရာချခြင်းစနစ်ကို တပ်ဆင်ပါ။ အောက်ပါပုံများတွင် ပြထားသည့်အတိုင်း စနစ်အား ချိတ်ဆက်ပါ။
ဦးထုပ်စစ်ဆေးခြင်းအာရုံခံကိရိယာမရှိခြင်း (စက်ရပ်တန့်)
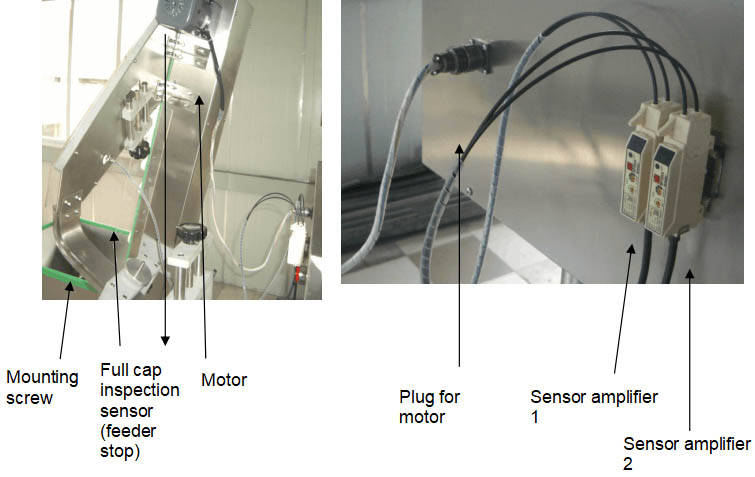
a လမ်းကြောင်းနေရာချခြင်းနှင့် ချဉ်းကပ်လမ်းကို တပ်ဆင်ထားသောဝက်အူဖြင့် ချိတ်ဆက်ပါ။
ခ control panel ရှိ ညာဖက်ခြမ်းရှိ ပလပ်ဖြင့် မော်တာဝါယာကြိုးကို ချိတ်ဆက်ပါ။
ဂ။ အာရုံခံအသံချဲ့စက် 1 ဖြင့် ဦးထုပ်စစ်ဆေးခြင်းအာရုံခံကိရိယာအပြည့်အစုံကို ချိတ်ဆက်ပါ။
ဃ။ အာရုံခံအသံချဲ့စက် 2 နှင့် ကင်းမဲ့ဦးထုပ်စစ်ဆေးခြင်းအာရုံခံကိရိယာကို ချိတ်ဆက်ပါ။
ဦးထုပ်တက်ခြင်းကွင်းဆက်၏ထောင့်ကို ချိန်ညှိပါ- ဦးထုပ်တောင်တက်ကွင်းဆက်၏ထောင့်ကို ပို့ဆောင်ခြင်းမပြုမီ သင်ပံ့ပိုးပေးထားသည့် နမူနာဦးထုပ်အတိုင်း ချိန်ညှိထားပါသည်။ ဦးထုပ်၏သတ်မှတ်ချက်များကိုပြောင်းလဲရန်လိုအပ်ပါက (အရွယ်အစားကိုပြောင်းလဲပါ၊ ဦးထုပ်အမျိုးအစားမပြောင်းဘဲ) ကျေးဇူးပြု၍ ဦးထုပ်၏ထိပ်ဖက်ကိုမှီသောဦးထုပ်များကိုသာထုပ်ပိုးနိုင်သည်အထိဝက်အူကိုချိန်ညှိခြင်းဖြင့်ဦးထုပ်၏ကွင်းဆက်၏ထောင့်ကိုချိန်ညှိပါ။ အောက်ပါအတိုင်းညွှန်ပြသည်-

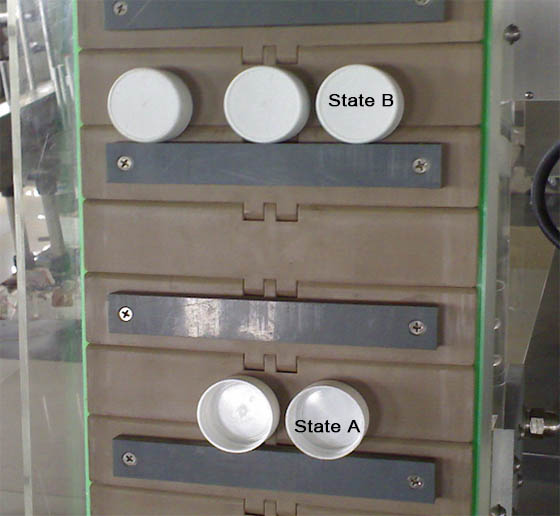
ဦးထုပ်တက်ခြင်း ကြိုးသည် ဦးထုပ်ကို ထုပ်ယူသောအခါ အခြေအနေ A ရှိ ဦးထုပ်သည် မှန်ကန်သော လမ်းကြောင်းဖြစ်သည်။
ကွင်းဆက်သည် သင့်လျော်သောထောင့်တွင်ရှိနေပါက state B ရှိ ဦးထုပ်သည် တိုင်ကီထဲသို့ အလိုအလျောက်ကျဆင်းသွားမည်ဖြစ်သည်။
(၂) ထုပ်ပိုးမှုစနစ် (chute) ကို ချိန်ညှိပါ။
ပေးထားသည့် နမူနာအတိုင်း ချုံးချုံးချရန် ထောင့်နှင့် နေရာတို့ကို သတ်မှတ်ပြီးဖြစ်သည်။ ပုံမှန်အားဖြင့် ပုလင်း သို့မဟုတ် ဦးထုပ်၏ အခြားသတ်မှတ်ချက်အသစ်မရှိပါက၊ ဆက်တင်ကို ချိန်ညှိရန်မလိုအပ်ပါ။ ပုလင်း သို့မဟုတ် ဦးထုပ်၏ သတ်မှတ်ချက် 1 ထက်ပိုသော သတ်မှတ်ချက်များရှိပါက၊ ဖောက်သည်သည် နောက်ထပ်မွမ်းမံမှုများအတွက် နေရာအလုံအလောက်ချန်ထားကြောင်း သေချာစေရန် ထုတ်လုပ်သူသည် စာချုပ်တွင် ပစ္စည်း သို့မဟုတ် ၎င်း၏ ပူးတွဲပါဖိုင်တွင် စာရင်းပြုစုရန် လိုအပ်သည်။ ချိန်ညှိနည်းမှာ အောက်ပါအတိုင်းဖြစ်သည်။
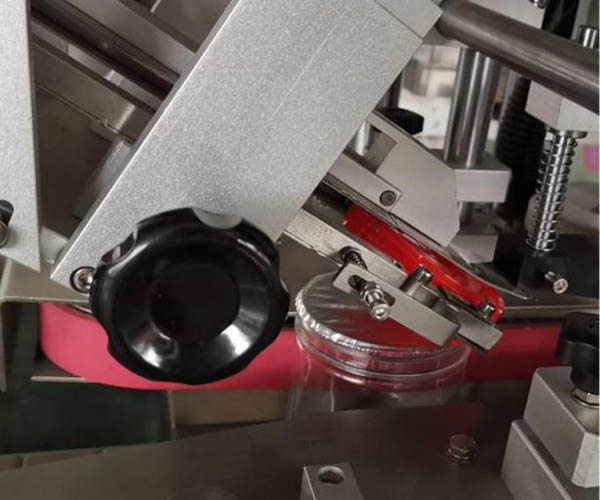
ဦးထုပ်ချခြင်းစနစ်၏ အမြင့်ကို ချိန်ညှိပါ- လက်ကိုင်ဘီးကို မလှည့်မီ တပ်ဆင်ထားသောဝက်အူကို ဖြည်ပေးပါ။
ချိန်ညှိသောဝက်အူသည် ချုံး၏နေရာလွတ်ကို ချိန်ညှိနိုင်သည်။
လက်ကိုင်ဘီး 2 (နှစ်ဖက်ပေါ်ရှိ) သည် ချွဲ၏နေရာအကျယ်ကို ချိန်ညှိနိုင်သည်။
(၃) ဦးထုပ်နှိပ်ခြင်းအပိုင်းကို ချိန်ညှိခြင်း။
ပုလင်းသည် အဖုံးဖိသည့်အပိုင်းသို့ နို့တိုက်သောအခါတွင် အဖုံးသည် ပုလင်းပါးစပ်ကို အလိုလို ဖုံးအုပ်ပေးလိမ့်မည်။ ပုလင်းများနှင့် ဦးထုပ်များ၏အမြင့်ကြောင့် ဦးထုပ်နှိပ်သည့်အပိုင်းကိုလည်း ချိန်ညှိနိုင်သည်။ ဦးထုပ်ပေါ်ရှိ ဖိအားသည် သင့်လျော်မှုမရှိပါက ၎င်းသည် ထုပ်ပိုးမှုစွမ်းဆောင်ရည်ကို ထိခိုက်စေမည်ဖြစ်သည်။ ဦးထုပ်ဖိသည့်အပိုင်း၏ အနေအထားသည် မြင့်မားနေပါက နှိပ်ခြင်းစွမ်းဆောင်ရည်အပေါ် လွှမ်းမိုးသွားမည်ဖြစ်သည်။ အနေအထား အလွန်နိမ့်ပါက ဦးထုပ် သို့မဟုတ် ပုလင်း ပျက်စီးလိမ့်မည်။ ပုံမှန်အားဖြင့် သင်္ဘောမတင်ပို့မီ ဦးထုပ်နှိပ်သည့်အပိုင်း၏ အမြင့်ကို ချိန်ညှိထားသည်။ အသုံးပြုသူသည် အမြင့်ကို ချိန်ညှိရန်လိုအပ်ပါက၊ ချိန်ညှိမှုနည်းလမ်းမှာ အောက်ပါအတိုင်းဖြစ်သည်။

ဦးထုပ်နှိပ်သည့်အပိုင်း၏ အမြင့်ကို မချိန်ဆမီ တပ်ဆင်ထားသောဝက်အူကို ဖြည်ပါ။
အသေးဆုံးပုလင်းနှင့် အံဝင်ခွင်ကျဖြစ်စေရန် စက်နှင့် ဖိထားသော အဖုံးနောက်တစ်ခုပါရှိပါသည်၊ ၎င်းကို ပြောင်းလဲနည်းကို ဗီဒီယိုတွင် ပြသထားသည်။
(၄)။ ဦးထုပ်ကို ချွဲထဲသို့မှုတ်ရန် လေဖိအားကို ချိန်ညှိခြင်း။

2. အဓိကအစိတ်အပိုင်းတစ်ခုလုံး၏အမြင့်ကိုချိန်ညှိခြင်း။
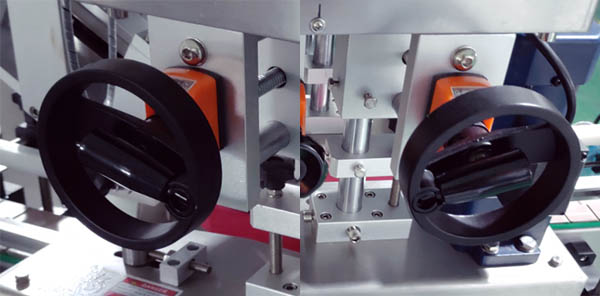
ပုလင်းပြုပြင်တည်ဆောက်ပုံ၊ သွားဖုံး-ပျော့ပျောင်းလှည့်ဘီး၊ ဦးထုပ်နှိပ်သည့်အပိုင်းကဲ့သို့သော အဓိကအစိတ်အပိုင်းများ၏ အမြင့်ကို စက်ဓာတ်လှေကားဖြင့် တစ်ခုလုံးကို ချိန်ညှိနိုင်သည်။ စက်ဓာတ်လှေကား၏ ထိန်းချုပ်ခလုတ်သည် ထိန်းချုပ်ဘောင်၏ ညာဘက်တွင်ရှိသည်။ အသုံးပြုသူသည် စက်ဓာတ်လှေကားမစတင်မီ ထောက်တိုင်နှစ်ခုရှိ တပ်ဆင်ထားသောဝက်အူကို ဖြည်သင့်သည်။
ø ဆိုသည်မှာ အဆင်းဖြစ်ပြီး ø ဆိုသည်မှာ အတက်ဖြစ်သည်။ လှည့်ဘီးများ၏ အနေအထားသည် ဦးထုပ်များနှင့် ကိုက်ညီကြောင်း သေချာစေရန်။ ကျေးဇူးပြု၍ ဓာတ်လှေကားပါဝါကိုပိတ်ပြီး ချိန်ညှိပြီးနောက် တပ်ဆင်ထားသောဝက်အူကို ချိတ်ထားပါ။
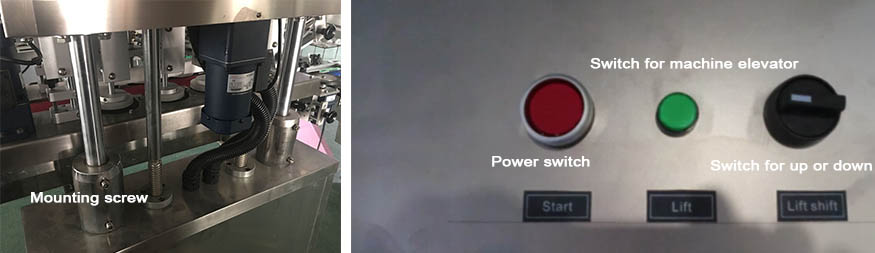
မှတ်ချက်- မှန်ကန်သောအနေအထားရသည်အထိ ကျေးဇူးပြု၍ ဓာတ်လှေကားခလုတ် (အစိမ်းရောင်) ကို အချိန်ပြည့်နှိပ်ပါ။ ဓာတ်လှေကားရဲ့အရှိန်က အရမ်းနှေးနေတယ်၊ စိတ်ရှည်ရှည်နဲ့ စောင့်ပေးပါ။
3. သွားဖုံး-ပျော့ပျောင်းလှည့်ပတ်ဘီး (လှည့်ပတ်ဘီး အတွဲသုံးတွဲ) ကို ချိန်ညှိပါ
စက်လှေကားဖြင့် လှည့်ပတ်ဘီး၏ အမြင့်ကို ချိန်ညှိသည်။
လှည့်ပတ်ဘီးတစ်စုံ၏ အကျယ်ကို ဦးထုပ်အချင်းအလိုက် ချိန်ညှိထားသည်။
ပုံမှန်အားဖြင့် ဘီးတစ်စုံကြားရှိ အကွာအဝေးသည် ဦးထုပ်အချင်းထက် 2-3 မီလီမီတာ လျော့နည်းသည်။ အော်ပရေတာသည် လက်ကိုင်ဘီး B. ဖြင့် လှည့်ပတ်၏အကျယ်ကို ချိန်ညှိနိုင်သည် (လက်ကိုင်ဘီးတစ်ခုစီသည် နှိုင်းရလှည့်ပတ်ဘီးကို ချိန်ညှိနိုင်သည်)။
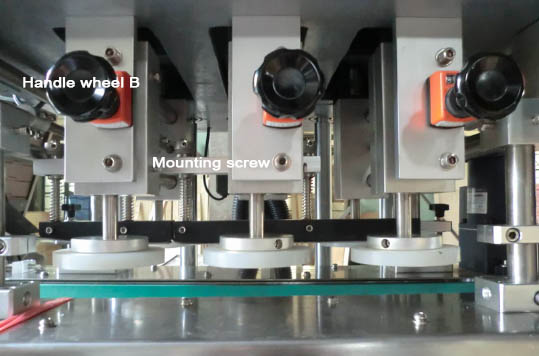
လက်ကိုင်ဘီး B ကို ချိန်ညှိခြင်းမပြုမီ တပ်ဆင်ထားသောဝက်အူကို ဖြည်ပါ။
4. ပုလင်းပြင်ဆင်ခြင်း ဖွဲ့စည်းပုံကို ချိန်ညှိခြင်း။
ပုလင်း၏ fix position ကို fix structure နှင့် link ဝင်ရိုးအနေအထားကိုချိန်ညှိခြင်းဖြင့်ချိန်ညှိနိုင်သည်။ ပုလင်းပေါ်တွင် ပြုပြင်ထားသော အနေအထားသည် အလွန်နိမ့်ပါက၊ ပုလင်းကို နို့တိုက်ချိန် သို့မဟုတ် ထုပ်နေစဉ်အတွင်း အလွယ်တကူ ချထားနိုင်သည်။ ဆန့်ကျင်ဘက်အနေနှင့် ပုလင်းပေါ်တွင် fix position အလွန်မြင့်မားပါက၊ ၎င်းသည် spin wheels ၏မှန်ကန်သောလုပ်ဆောင်မှုကိုနှောင့်ယှက်မည်ဖြစ်သည်။ ချိန်ညှိပြီးနောက် Conveyor နှင့် ပုလင်းပြင်ဆင်ခြင်းတည်ဆောက်ပုံများ၏ အလယ်ဗဟိုမျဉ်းကြောင်း သေချာပါစေ။

ပုလင်းပြုပြင်ထားသော ခါးပတ်ကြားအကွာအဝေးကို ချိန်ညှိရန် လက်ကိုင်ဘီး A (လက်ကိုင်ကို 2 လက်ဖြင့် လှည့်ရန်)။ ထို့ကြောင့် နှိပ်ခြင်းလုပ်ငန်းစဉ်တွင် ပုလင်းဖွဲ့စည်းပုံသည် ကောင်းမွန်စွာ ပြုပြင်နိုင်သည်။
ပုလင်းပြုပြင်ခြင်း ခါးပတ်၏အမြင့်ကို စက်ဓာတ်လှေကားဖြင့် ချိန်ညှိလေ့ရှိသည်။
(သတိပြုရန်- အော်ပရေတာသည် 4 link shaft တွင်တပ်ဆင်ထားသောဝက်အူကိုဖြည်ပြီးနောက် micro-scope တွင်ပုလင်းပြုပြင်ခြင်းခါးပတ်၏အမြင့်ကိုချိန်ညှိနိုင်သည်။)
အော်ပရေတာသည် ကြီးမားသောအကွာအဝေးတွင် fix ခါးပတ်ကိုရွှေ့ရန် လိုအပ်ပါက၊ ဝက်အူ 1 နှင့် ဝက်အူ 2 တို့ကို တွဲဖြည်ပြီးနောက် ခါးပတ်အနေအထားကို ချိန်ညှိပါ၊ အော်ပရေတာသည် သေးငယ်သောအကွာအဝေးတွင် ခါးပတ်အမြင့်ကို ချိန်ညှိရန်လိုအပ်ပါက ကျေးဇူးပြု၍ ဝက်အူ 1 ကိုသာဖြည်ပြီး ချိန်ညှိခလုတ်ကို လှည့်ပါ။

5. ပုလင်းနေရာအား ချိန်ညှိခြင်း ဘီးနှင့် လက်ရန်းများကို ချိန်ညှိခြင်း။
အော်ပရေတာသည် ပုလင်း၏သတ်မှတ်ချက်ကို အစားထိုးသည့်အခါ ပုလင်းနေရာအား ချိန်ညှိသည့်ဘီးနှင့် လက်ရန်းများ၏ အနေအထားကို ပြောင်းလဲသင့်သည်။ နေရာချိန်ညှိဘီးနှင့် လက်ရန်းကြားရှိနေရာသည် ပုလင်းအချင်းထက် 2-3 မီလီမီတာ ပိုနည်းသင့်သည်။ ကျေးဇူးပြု၍ ချိန်ညှိပြီးနောက် ကော်တင်ယာနှင့် ပုလင်းပြုပြင်ခြင်းတည်ဆောက်ပုံများ၏ အလယ်မျဉ်းသည် တူညီသောမျဉ်းပေါ်တွင်ရှိကြောင်း သေချာပါစေ။
Loosen adjusting screw ပုလင်းနေရာချိန်ညှိဘီး၏ အနေအထားကို ချိန်ညှိနိုင်သည်။
လျော့ရဲသောချိန်ညှိလက်ကိုင်သည် conveyor ၏နှစ်ဖက်စလုံးရှိလက်ရန်း၏အကျယ်ကိုချိန်ညှိနိုင်သည်။


